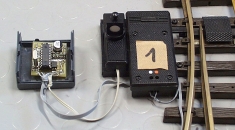
Der Decoder.
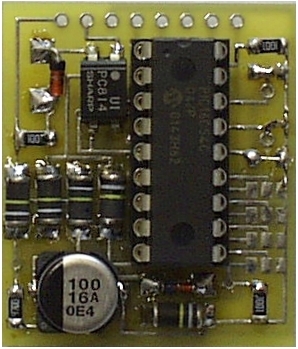
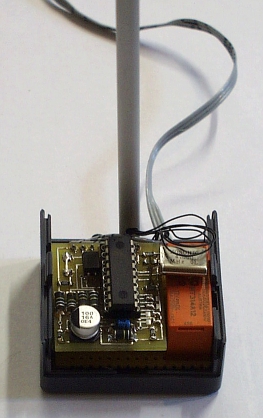
Bestückungs- und Lötseite des Decoders
An den Schienen der Gleisanlage liegt normalerweise eine Gleichspannung von 15..18Volt. Während der Booster Steuerinformation überträgt, wird diese Spannung jeweils für bestimmte Zeiten umgepolt (siehe Protokoll). Die Aufgabe des Decoders besteht darin, diese Steuerinformation in geeignete Impulse zur Motor- und Beleuchtungssteuerung umzusetzen. Hierzu muss der Decoder die Zieladresse der Steuerinformation mit seiner eigenen Adresse vergleichen, und, bei Übereinstimmung, das Kommando umsetzen.
 |
 |
Schaltung des Decoders
Die von den Stromabnehmern gelieferte Spannung wird von den Dioden D1 bis D4 gleichgerichtet. R1 bildet mit Z1 einen Spannungsregler, der eine Ausgangsspannung von ca. 5.6Volt liefert. Die Diode D6 sorgt dafür, dass der Elko C1 "bei Stromausfall" nicht über die Leistungsstufe und den Motor entladen wird und reduziert im Betrieb die 5.6Volt um ca. 0.6V. Dadurch liegen am Pluspol von C1 ziemlich genau 5V zur Versorgung des PIC-Mikrokontrollers an. Für ein sicheres Entladen von C1 (und damit für einen sauberen Reset des PIC) sorgt der Widerstand R3 (der ggf. auch hochohmiger dimensioniert werden kann).
Da die Steuerinformation durch Polaritätswechsel übertragen wird, ist die Information hinter der Gleichrichterbrücke natürlich weg. Die Information muss irgendwie um den Gleichrichter herum geführt werden. Gleichzeitig muss dies potenzialgetrennt erfolgen, da kein Knotenpaar vor und nach dem Gleichrichter auf dem selben Potenzial liegen darf. Aus diesem Grund wird ein Optokoppler eingesetzt. Im Originaldesign ist der Optokoppler vom Typ PC817. Dieser Typ enthält zwei antiparallel geschaltete LED, ist also ein Spannungsdetektor. Um eine der LEDs abzuschalten ist die Selektionsdiode D5 vorgesehen. Wie sie eingebaut wird ist völlig egal da sich die PIC-Software automatisch auf die richtige Polarität einstellt. Einfacher ist es, einen anderen Optokoppler (z.B. vom Typ PC814) einzusetzen. Dieser Optokoppler enthält nur eine LED, ist also ein Polaritäsdetektor. Anstelle der Selektionsdiode kann eine Drahtbrücke eingesetzt werden.
Sekundärseitig dient R4 dazu, die gewonnene Information an einen Eingang (RA3) des PICs zu bringen. Die Ausgänge RB0 und RB1 steuern Transistorstufen mit open-collector an. Diese Stufen sind in der Lage ca. 100mA zu schalten und sind zur Ansteuerung von Leuchtdioden oder Kleinstglühlämpchen gedacht (z.B. zur richtungsabhängigen Zugbeleuchtung).
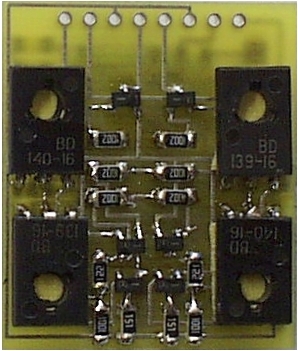
Die Ausgänge RB2 und RB3 sind pulsweitenmodulierte Ausgänge (PWM) die eine Leistungsstufe ansteuern. Diese Stufe ist komplett auf der Rückseite der Platine aufgebaut. Sie besteht aus einer Vollbrückenschaltung mit insgesamt 8 Transistoren und ist in der Lage einen maximalen Strom von 1A .. 1.5A zu treiben. Die Ausgänge eignen sich zur Steuerung von Lokmotoren, Weichen- oder Signalmagneten, etc. Die PIC-Software erlaubt die Leistung in 32 Stufen pro Richtung einzustellen. Leider ist die Verlustleistung (und damit die Abwärme) der Leistungsstufe ziemlich groß. Deshalb wird derzeit über ein Redesign mit MOSFETS nachgedacht.
Über die Pins RB4 bis RB7 können die 4 niederwertigen Bits der Decoderadresse eingestellt werden. Die vier höherwertigen Bits werden direkt in den Mikrokontroller programmiert ("gebrannt").
 |
 |
Lokdecoder
 |
 |
Der Anschluss für das Sondersignal (elektronische Pfeife, Läutwerk oder Horn) erfolgt direkt an Pin 17 (Port RA0) des PIC. Der maximal erlaubte Laststrom an diesem Pin (siehe Datenblatt) darf nicht überschritten werden. Ggf. eine Transistorstufe als Treiber einsetzen.
Weichendecoder
 |
 |
Anstelle des Antriebsmotors einer Lok kann auch ein Weichenantrieb angeschlossen werden. Dabei ist es gleichgültig, ob es sich um einen Motor oder einen Elektromagneten handelt. Die Decodersoftware für Weichen und Signale schaltet den Antriebsstrom nach ca. 2.5 Sekunden automatisch ab (falls das entsprechenden Kommando auf der Übertragungsstrecke verloren gegangen sein sollte). Dies schützt die Spule, die Ansteuerelektronik und spart Strom.
Signaldecoder
 |
 |
Auch ein bistabiles Relais kann an den Ausgang für den Antrieb angeschlossen werden. Auf diese Weise lässt sich sehr einfach ein Signal (mit Zugbeeinflussung) realisieren. Auch die Kopplung mit einem Vorsignal ist möglich: Das Vorsignal bekommt die selbe Adresse wie das Hauptsignal. Wird das Hauptsignal umgeschaltet, so schaltet das Vorsignal automatisch mit um.
Beleuchtungsdecoder
 |
Der Beleuchtungsdecoder kann LEDs oder Glühlampen schalten. Für die LEDs sollten die einfachen Treiberstufen genügen, für die Glühlampen ist es besser, den Motorausgang zu verwenden. Zum Einschalten wird das Kommando "Vorwärts" gegeben. Es genügt also nur diejenigen Bauelemente zu bestücken, die zur Richtung "vorwärts" gehören. Wird die Sendersoftware entsprechend ausgelegt, so ist mit Anschluss an die Motorausgänge auch ein Dimmen der Glühlampen möglich.
Downloads Decoder:
Stückliste, Lötseite (Gerber-X), Bestückungsseite (Gerber-X), Umriss (Gerber-X), Bohrdaten (Exellon), Bohrer
Software für Lokdecoder: Quellcode (PIC Assembler, V1.0 beta), Zielcode (Intel HEX File, V1.0 beta)
Softwared für Weichendecoder: Quellcode (PIC Assembler, V1.0 beta), Zielcode (Intel HEX File, V1.0 beta)
Software für Signaldecoder: Quellcode (PIC Assembler, V1.0 beta), Zielcode (Intel HEX File, V1.0 beta)
Software für Beleuchtungsdecoder: Quellcode (PIC Assembler, V1.0 beta), Zielcode (Intel HEX File, V1.0 beta)
Links:
Der Diagnosedecoder
<in Bearbeitung>
Downloads Diagnose-Decoder:
Stückliste, Lötseite (Gerber-X), Bestückungsseite (Gerber-X), Umriss (Gerber-X), Bohrdaten (Exellon), Bohrer
Software: Quellcode (PIC Assembler, V1.0 beta), Zielcode (Intel HEX File, V1.0 beta)
Links:
Die genannten Marken- oder Produktnamen sind Warenzeichen oder eingetragene Warenzeichen der jeweiligen Eigentümer